The selection of a server is both simple and complicated: simple because, really, any x86-based platform will suffice, but complicated because the reliable performance of your system will depend on the care that is put into the platform design. When selecting your hardware, you must carefully consider the overall design of your system and what functionality you need to support. This will help you determine your requirements for the CPU, motherboard, and power supply. If you are simply setting up your first Asterisk system for the purpose of learning, you can safely ignore the information in this section. If, however, you are building a mission-critical system suitable for deployment, these are issues that require some thought.
Among other considerations, when selecting the hardware for an Asterisk installation you must bear in mind this critical question: how powerful must the system be? This is not an easy question to answer, because the manner in which the system is to be used will play a big role in the resources it will consume. There is no such thing as an Asterisk performance-engineering matrix, so you will need to understand how Asterisk uses the system in order to make intelligent decisions about what kinds of resources will be required. You will need to consider several factors, including:
- The maximum number of concurrent connections the system will be expected to support
- The percentage of traffic that will require processor-intensive DSP of compressed codecs (such as G.729 and GSM)
The digital signal processing (DSP) work that Asterisk performs in software can have a staggering impact on the number of concurrent calls it will support. A system that might happily handle 50 concurrent G.711 calls could be brought to its knees by a request to conference together 10 G.729 compressed channels. We talk more about G.729, GSM, G.711, and many other codecs in Appendix B, Protocols for VoIP.
- Whether conferencing will be provided, and what level of conferencing activity is expected
Will the system be used heavily? Conferencing requires the system to transcode and mix each individual incoming audio stream into multiple outgoing streams. Mixing multiple audio streams in near-real time can place a significant load on the CPU.
- Echo cancellation
Echo cancellation may be required on any call where a Public Switched Telephone Network (PSTN) interface is involved. Since echo cancellation is a mathematical function, the more of it the system has to perform, the higher the load on the CPU will be.[219] Some telephony hardware vendors offer hardware-based echo cancellation to remove the burden of this task from the host CPU. Echo cancellation is discussed briefly later in this appendix and in more depth in Appendix B, Protocols for VoIP.
- Dialplan scripting logic
Whenever Asterisk has to pass call control to an external program, there is a performance penalty. As much logic as possible should be built into the dialplan. If external scripts are used, they should be designed with performance and efficiency as critical considerations.
As for the exact performance impact of these factors, it’s difficult to know for sure. The effect of each is known in general terms, but an accurate performance calculator has not yet been successfully defined. This is partly because the effect of each component of the system is dependent on numerous variables, such as CPU power, motherboard chipset and overall quality, total traffic load on the system, Linux kernel optimizations, network traffic, number and type of PSTN interfaces, and PSTN traffic—not to mention any non-Asterisk services the system is performing concurrently. Let’s take a look at the effects of several key factors:
- Codecs and transcoding
Simply put, a codec (short for coder/decoder, or compression/decompression) is a set of mathematical rules that define how an analog waveform will be digitized. The differences between the various codecs are due in large part to the levels of compression and quality that they offer. Generally speaking, the more compression that’s required, the more work the DSP must do to code or decode the signal. Uncompressed codecs, therefore, put far less strain on the CPU (but require more network bandwidth). Codec selection must strike a balance between bandwidth and processor usage. For more on codecs, see Appendix B, Protocols for VoIP.
- Central processing unit (and floating point unit)
A CPU is composed of several components, one of which is the floating point unit (FPU). The speed of the CPU, coupled with the efficiency of its FPU, will play a significant role in the number of concurrent connections a system can effectively support. The next section (the section called “Choosing a Processor”) offers some general guidelines for choosing a CPU that will meet the needs of your system.
- Other processes running concurrently on the system
Being Unix-like, Linux is designed to be able to multitask several different processes. A problem arises when one of those processes (such as Asterisk) demands a very high level of responsiveness from the system. By default, Linux will distribute resources fairly among every application that requests them. If you install a system with many different server applications, those applications will each be allowed their fair use of the CPU. Since Asterisk requires frequent high-priority access to the CPU, it does not get along well with other applications, and if Asterisk must coexist with other apps, the system may require special optimization. This primarily involves the assignment of priorities to various applications in the system and, during installation, careful attention to which applications are installed as services.
- Kernel optimizations
A kernel optimized for the performance of one specific application is something that very few Linux distributions offer by default, and thus it requires some thought. At the very minimum—whichever distribution you choose—you should download and compile on your platform a fresh copy of the Linux kernel (available from http://www.kernel.org). You may also be able to acquire patches that will yield performance improvements, but these are considered hacks to the officially supported kernels.
- IRQ latency
Interrupt request (IRQ) latency is basically the delay between the moment a peripheral card (such as a telephone interface card) requests the CPU to stop what it’s doing and the moment when the CPU actually responds and is ready to handle the task. Asterisk’s peripherals (especially the DAHDI cards) have historically been intolerant of IRQ latency, though there have been extensive improvements in DAHDI to help improve these issues. This is not due to any problem with the cards, but rather is part of the nature of how a software-based TDM engine has to work. If we buffer the TDM data and send it on the bus as a larger packet, that may be more efficient from a system perspective, but it will create a delay between the time the audio is received on the card, and when it is delivered to the CPU. This makes real-time processing of TDM data next to impossible. In the design of DAHDI, it was decided that sending the data every 1 ms would create the best tradeoff, but a side effect of this is that any card in the system that uses the DAHDI interface is going to ask the system to process an interrupt every millisecond. This used to be a factor on older motherboards, but it has largely ceased to be a cause for concern.
Tip
Linux has historically had problems with its ability to service IRQs quickly; this problem has caused enough trouble for audio developers that several patches have been created to address this shortcoming. So far, there has been some mild controversy over how to incorporate these patches into the Linux kernel.
- Kernel version
Asterisk is officially supported on Linux version 2.6. Almost all of Asterisk itself does not really care about the kernel version, but DAHDI requires 2.6.
- Linux distribution
Linux distributions are many and varied. Asterisk should work on all of them. Choose the one that you are most comfortable with.
Since the performance demands of Asterisk will generally involve a large number of math calculations, it is essential that you select a processor with a powerful FPU. The signal processing that Asterisk performs can quickly demand a staggering quantity of complex mathematical computations from the CPU. The efficiency with which these tasks are carried out will be determined by the power of the FPU within the processor.
Actually naming a best processor for Asterisk in this book would fly in the face of Moore’s Law. Even in the time between the authoring and publishing of this book, processor speeds will undergo rapid improvements, as will Asterisk’s support for various architectures. Obviously, this is a good thing, but it also makes the giving of advice on the topic a thankless task. Naturally, the more powerful the FPU is, the more concurrent DSP tasks Asterisk will be able to handle, so that is the ultimate consideration. When you are selecting a processor, the raw clock speed is only part of the equation. How well it handles floating-point operations will be a key differentiator, as DSP operations in Asterisk will place a large demand on that process.
Both Intel and AMD CPUs have powerful FPUs. Current-generation chips from either of those manufacturers can be expected to perform well.[220]
The obvious conclusion is that you should get the most powerful CPU your budget will allow. However, don’t be too quick to buy the most expensive CPU out there. You’ll need to keep the requirements of your system in mind; after all, a Formula 1 Ferrari is ill-suited to the rigors of rush-hour traffic. Slower CPUs will often run cooler, so you might be able to build a lower-powered, fanless Asterisk system for a small office, which could work well in a dusty environment, for example.
To attempt to provide you with a frame of reference from which you can contemplate your platform decision, we have chosen to define three sizes of Asterisk systems: small, medium, and large.
Small systems (up to 10 phones) are not immune to the performance requirements of Asterisk, but the typical load that will be placed on a smaller system will generally fall within the capabilities of a modern processor.
If you are building a small system from older components you have lying around, be aware that the resulting system cannot be expected to perform at the same level as a more powerful machine, and performance will begin to degrade under a much lighter load. Hobby systems can be run successfully on very low-powered hardware, although this is by no means recommended for anyone who is not a whiz at Linux performance tuning.[221]
If you are setting up an Asterisk system for the purposes of learning, you will be able to build a fully featured platform using a relatively low-powered CPU. The authors of this book run several Asterisk lab systems with 433-MHz to 700-MHz Celeron processors, but the workload of these systems is minimal (never more than two concurrent calls).
Medium-sized systems (from 10 to 50 phones) are where performance considerations will be the most challenging to resolve. Generally, these systems will be deployed on one or two servers only, and thus each machine will be required to handle more than one specific task. As loads increase, the limits of the platform will become increasingly stressed. Users may begin to perceive quality problems without realizing that the system is not faulty in any way, but simply exceeding its capacity. These problems will get progressively worse as more and more load is placed on the system, with the user experience degrading accordingly. It is critical that performance problems be identified and addressed before users notice them.
Monitoring performance on these systems and quickly acting on any developing trends is key to ensuring that a quality telephony platform is provided.
Large systems (more than 120 channels) can be distributed across multiple systems and sites, and performance concerns can be managed through the addition of machines. Very large Asterisk systems have been created in this way.
Building a large system requires an advanced level of knowledge in many different disciplines. We will not discuss it in detail in this book, other than to say that the issues you’ll encounter will be similar to those encountered during any deployment of multiple servers handling a single, distributed task.
Just to get any anticipation out of the way, we also cannot recommend specific motherboards in this book. With new motherboards coming out on a weekly basis, any recommendations we could make would be rendered moot by obsolescence before the published copy hit the shelves. Not only that, but motherboards are like automobiles: while they are all very similar in principle, the difference is in the details. And as Asterisk is a performance application, the details matter.
What we will do, therefore, is give you some idea of the kinds of motherboards that can be expected to work well with Asterisk, and the features that will make for a good motherboard. The key is to have both stability and high performance. Here are some guidelines to follow:
The various system buses must provide the minimum possible latency. If you are planning a PSTN connection using analog or PRI interfaces (discussed later in this appendix), having DAHDI cards in the system will generate 1,000 interrupt requests per second. Having devices on the bus that interfere with this process will result in degradation of call quality. Chipsets from Intel (for Intel CPUs) and nVidia nForce (for AMD CPUs) seem to score the best marks in this area. Review the specific chipset of any motherboard you are evaluating to ensure that it does not have known problems with IRQ latency.
If you are running DAHDI cards in your system, you will want to ensure that your BIOS allows you maximum control over IRQ assignment. As a rule, high-end motherboards will offer far greater flexibility with respect to BIOS tweaking; value-priced boards will generally offer very little control. This may be a moot point, however, as APIC-enabled motherboards turn IRQ control over to the operating system.
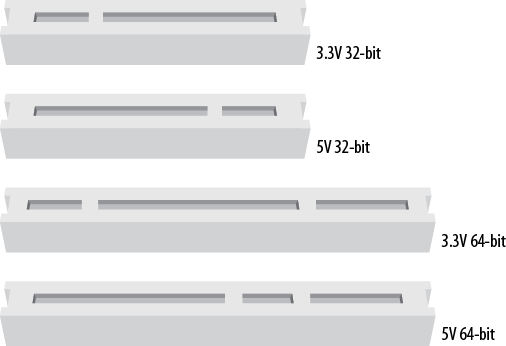
Server-class motherboards generally implement a different PCI standard than workstation-class motherboards. While there are many differences, the most obvious and well known is that the two versions have different voltages. Depending on which cards you purchase, you will need to know if you require 3.3V or 5V PCI slots.[222] Figure C.1, “Visual identification of PCI slots” shows the visual differences between 3.3V and 5V slots. Most server motherboards will have both types, but workstations will typically have only the 5V version.
Tip
There is some evidence that suggests connecting together two completely separate, single-CPU systems may provide far more benefits than simply using two processors in the same machine. You not only double your CPU power, but you also achieve a much better level of redundancy at a similar cost to a single-chassis, dual-CPU machine. Keep in mind, though, that a dual-server Asterisk solution will be more complex to design than a single-machine solution.
Consider using multiple processors, or processors with multiple cores. This will provide an improvement in the system’s ability to handle multiple tasks. For Asterisk, this will be of special benefit in the area of floating-point operations.
If you need a modem, install an external unit that connects to a serial port. If you must have an internal modem, you will need to ensure that it is not a so-called “Win-modem”—it must be a completely self-sufficient unit (note that these are very difficult, if not impossible, to find).
Consider that with built-in networking, if you have a network component failure, the entire motherboard will need to be replaced. On the other hand, if you install a peripheral Network Interface Card (NIC), there may be an increased chance of failure due to the extra mechanical connections involved. It can also be useful to have separate network cards serving sets and users (the internal network) and VoIP providers and external sites (the external network). NICs are cheap; we suggest always having at least two.
The stability and quality of your Asterisk system will be dependent on the components you select for its architecture. Asterisk is a beast, and it expects to be fed the best. As with just about anything, high cost is not always synonymous with quality, but you will want to become a connoisseur of computer components.
Having said all that, we need to get back to the original point: Asterisk can and will happily install on pretty much any system that will run Linux. The lab systems used to write this book, for example, included everything from a Linksys WRT to a dual-Xeon locomotive.[223] We have not experienced any performance or stability problems running less than five concurrent telephone connections. For the purposes of learning, do not be afraid to install Asterisk on whatever system you can scrounge up. When you are ready to put your system into production, however, you will need to understand the ramifications of the choices you make with respect to your hardware.
One often-overlooked component in a PC is the power supply (and the supply of power). For a telecommunications system,[224] these components can play a significant role in the quality of the user experience.
The power supply you select for your system will play a vital role in the stability of the entire platform. Asterisk is not a particularly power-hungry application, but anything relating to multimedia (whether it be telephony, professional audio, video, or the like) is generally sensitive to power quality.
This oft-neglected component can turn an otherwise top-quality system into a poor performer. By the same token, a top-notch power supply might enable an otherwise cheap PC to perform like a champ.
The power supplied to a system must provide not only the energy a system needs to perform its tasks but also stable, clean signal lines for all of the voltages the system expects from it.
Spend the money and get a top-notch power supply (gamers are pretty passionate about this sort of thing, so there are lots of choices out there).
In a carrier-grade or high-availability environment, it is common to deploy servers that use a redundant power supply. Essentially, this involves two completely independent power supplies, either one of which is capable of meeting the power requirements of the system.
If this is important to you, keep in mind that best practices suggest that to be properly redundant, these power supplies should be connected to completely independent uninterruptible power supplies (UPSs) that are in turn fed by totally separate electrical circuits. In truly mission-critical environments (such as hospitals), even the main electrical feeds into the building are redundant, and diesel-powered generators are on-site to generate electricity during extended power failures (such as the one that hit Northeastern North America on August 15, 2003).
[219] Roughly 30 MHz of CPU power per channel.
[220] If you want to be completely up-to-the-minute on which CPUs are leading the performance race, surf on over to Tom’s Hardware (http://www.tomshardware.com) or AnandTech (http://www.anandtech.com), where you will find a wealth of information about both current and out-of-date CPUs, motherboards, and chipsets.
[221] Greg Boehnlein once compiled and ran Asterisk on a 133-MHz Pentium system, but that was mostly as an experiment. Performance problems are far more likely in such conditions, and properly configuring such a system requires an expert knowledge of Linux. We do not recommend running Asterisk on anything less than a 500-MHz system (for a production system, 2 GHz might be a sensible minimum). Still, we think the fact that Asterisk is so flexible is remarkable.
[222] With the advent of PCI-X and PCI-Express, it is becoming harder and harder to select a motherboard with the correct type of slots. Be very certain that the motherboard you select has the correct type and quantity of card slots for your hardware. Keep in mind that most companies that produce hardware cards for Asterisk offer PCI and PCI-Express versions, but it’s still up to you to make sure they make sense in whatever motherboard and chassis combination you choose.
[223] OK, it wasn’t actually a locomotive, but it sure sounded like one. Does anyone know where to get quiet CPU fans for Xeon processors? It’s getting too loud in the lab here.
[224] Or any system that is expected to process audio.